基于Web远程运动控制系统的研究
李伟荣1,林尚勇2
(1.深圳地铁集团有限公司,广东 深圳518060)
(2.深圳智信达数控系统有限公司,广东 深圳518054)
现代信息技术特别是分布式计算技术、通讯技术和互联网及其相关软件技术的飞速发展,为在网络环境下的制造提供了更加有效的手段。随着计算机技术以及网络技术的发展, 尤其是Internet的普及, 人们对工业系统的过程控制提出了越来越高的要求,控制应当不仅仅局限于现场控制,应该与网络Internet/Intranet技术相结合, 通过它们对实际控制系统进行远程监控。本文设计并实现了通过网络客户端对快速成形设备进行控制、监测及数据采集的网络控制系统,为进一步研究在网络环境下对数控设备进行远程调试、监控和信息集成奠定基础,具有重大现实意义[1]。
1单机运动控制系统
单机运动控制系统主要是通过运动控制器控制电机来实现各种控制运动。运动控制器的核心是数字信号处理器(DSP),它可实现高性能的控制计算。运动控制器提供标准的ISA总线和PCI总线,可以方便地添加到PC机当中。
在动态链接库(DLL)中提供访问运动控制器的数控内核API,该DLL由制造商随运动控制器一起提供。用户在构建自己的应用系统时,通过调用DLL中的数控内核API访问运动控制器,从而将运动控制器的控制功能与用户系统的数据处理、界面显示、网络访问等功能集成在一起,灵活构建符合特定应用要求的控制系统。因此对于不同的加工系统,可以使用运动控制器所提供的数控内核API,开发出相应的应用软件系统。本文所研究的对象为深圳智信达数控系统有限公司提供的、采用固高四轴运动控制卡为本地控制系统的快速成形设备。图1为典型的单机运动控制系统架构。
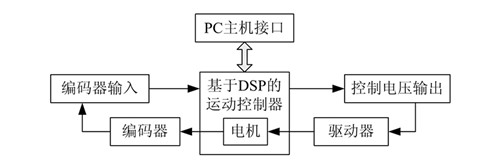
图1单机运动控制系统架构
2远程控制系统模型设计
2.1远程控制系统网络架构
随着Internet技术的不断发展,互联网应用范围日益广泛,并且互联网的安全性问题、数据传输的实时性问题也得到了很好的解决,使得各种不同的信号都能保质保量地在互联网上传送。
再者,现在数控设备的可控性、开放性越来越好,可以用不同的方式来控制设备的运作。
本系统的网络体系结构如图2所示。
系统采用B/S(浏览器/服务器)网络模式。服务器采用Windows系统自带的IIS服务器。远程控制客户端由浏览器组成,它们负责与运动控制卡的数据接口,并将参数按一定的协议通过网络传递给后端的服务器进行处理。服务器端有专门处理控制参数的服务程序,服务程序根据控制参数调用动态链接库驱动设备运动[2]。
作者简介:李伟荣(1983—),男,广东五华人,深圳地铁集团有限公司工程师,硕士,主要研究方向为设备远程监控。
(文章来源《机械设计与制造工程》如需详细资料请联系江苏机械门户网)
| 





 最新图文
最新图文
